As one of the ways to reduce the risk of collision in the field of collaborative robot use, Safetics proposes to attach a soft cover, which is a lattice-like shock reduction material, to the dangerous point of the robot and gripper. It can also be used for collision risk analysis by setting up a virtual soft cover at the robot’s joints or collision expected points in the SafetyDesigner.
 Soft cover need to be designed customized to dangerous points of the gripper or work object and incur certain costs. Please contact Safetics for production.
Soft cover need to be designed customized to dangerous points of the gripper or work object and incur certain costs. Please contact Safetics for production.
Setting the soft cover significantly lowers the Collision Risk Index (CRI) value of the corresponding area in the analysis results, which can have a significant impact on determining whether the simulation results pass/fail.
Let’s look at the soft cover application method and the difference between analysis results before and after the application through an example using the H2017 robot.
1. Soft cover Setting
There are two ways to set up a soft cover.
① Setting on the robot joints
Under the category menu, in the Robot information, you can apply a soft cover to the robot’s joints for analysis.
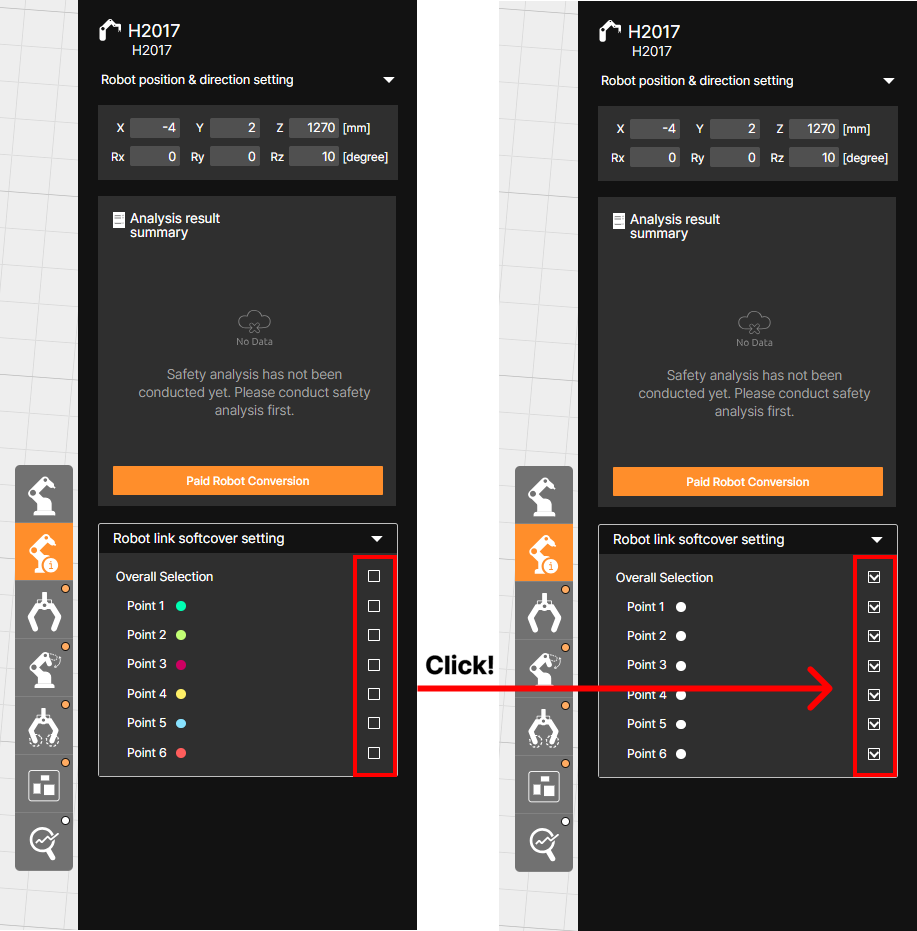
When you click the checkbox, the analysis will be performed with the soft cover applied to the checked point.
② Setting on the collision expected point
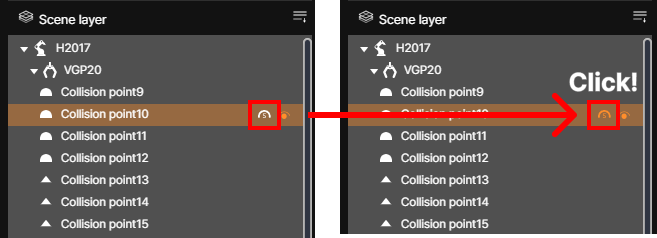
In the Analysis Information list on the left side of the 3D screen, click on the soft cover icon of the collision expected point to which the soft cover will be applied to complete the setup.
See Create Collision Point for setting up a collision expected point.
2. Check Analysis Results
To see how the application of soft cover affects the CRI value, let’s look at the screen example of the analysis results using the H2017 robot.
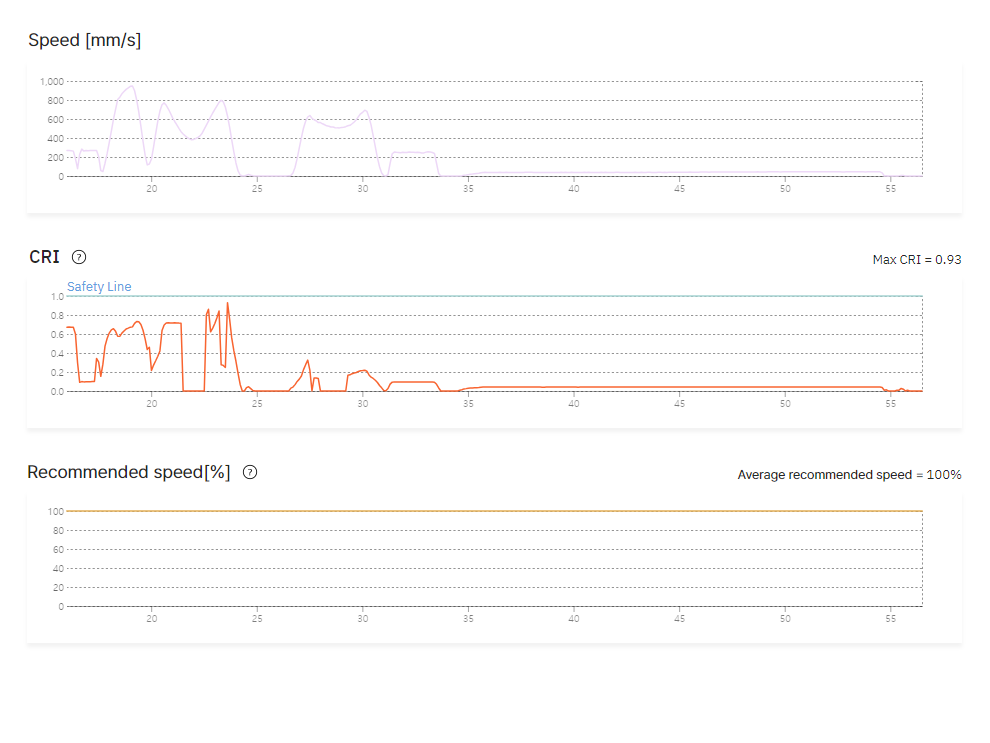
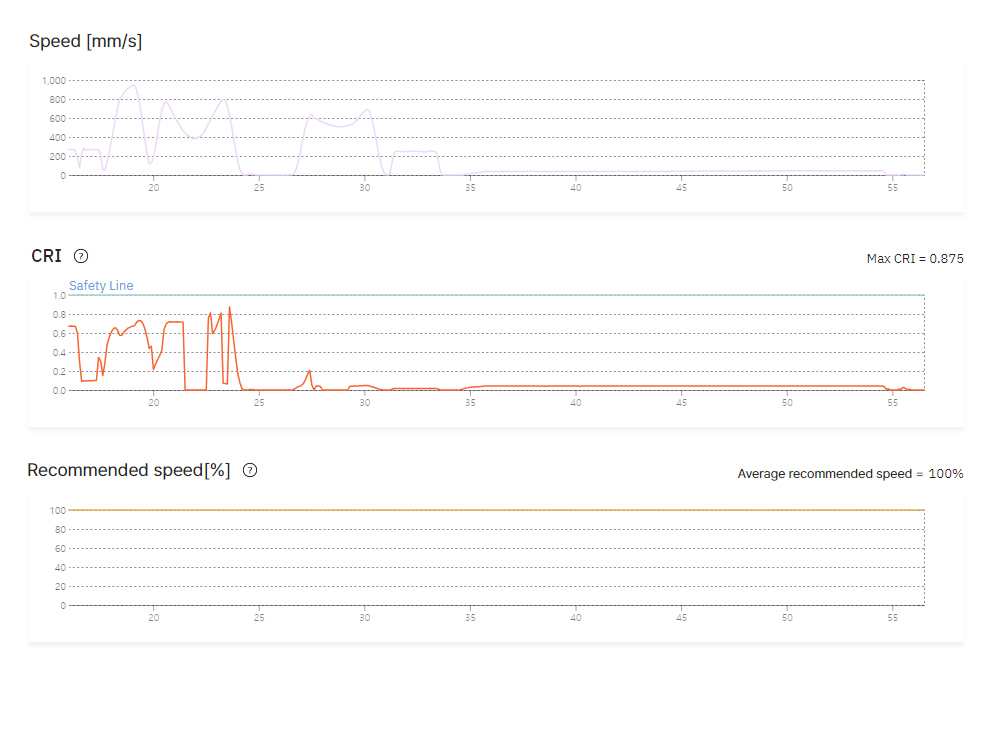
① Result of soft cover application to the robot joints
Before applying the soft cover to Point 5, the Max CRI value among the robot’s joints was 0.93. However, after the application, the value decreased to 0.875.
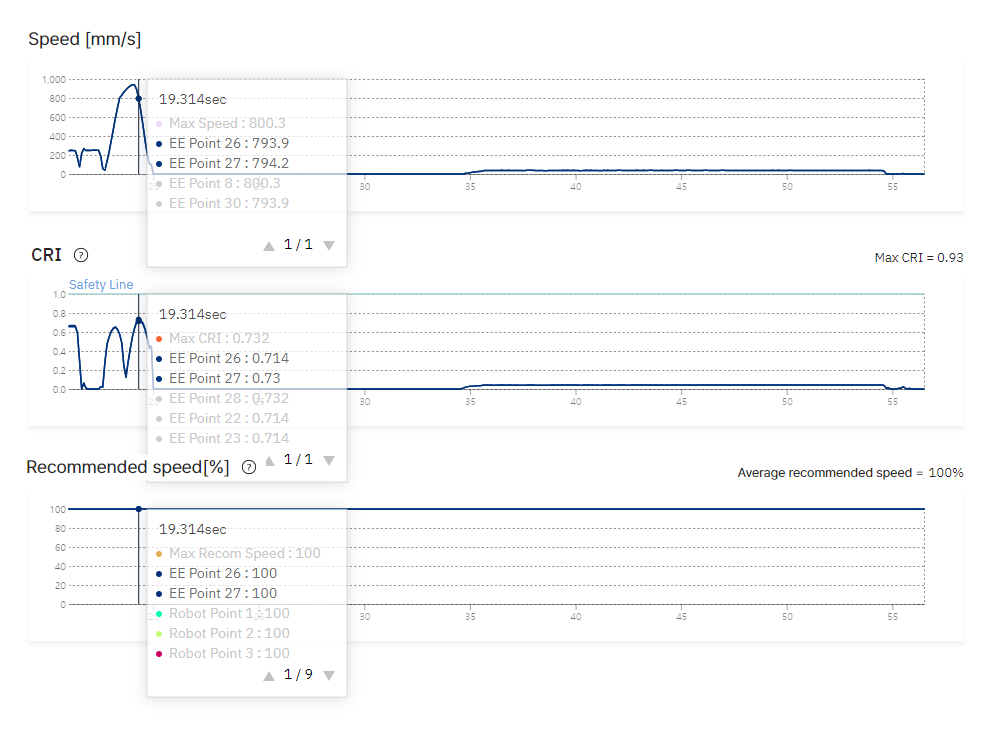
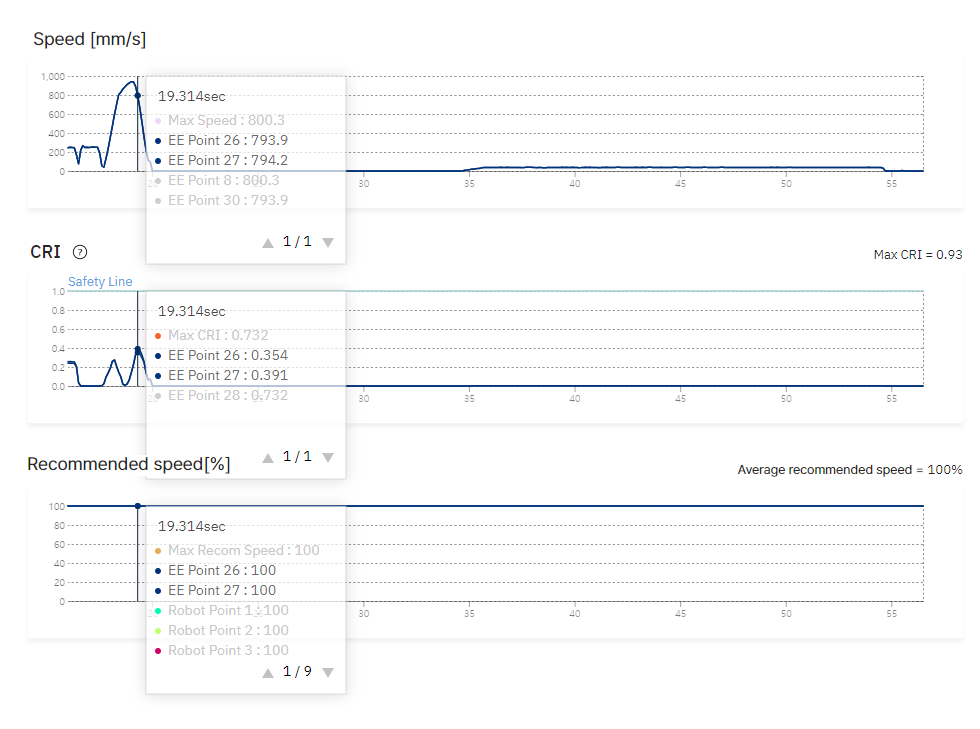
② Result of soft cover application to the collision expected point
Before the application of the soft cover, the two collision expected points had CRI values of 0.714 and 0.73, respectively. But after the application, they were significantly reduced to 0.354 and 0.391.